部分实验思路与实践经验,源于与高校师生的长期交流与实践积累 。 相关内容已整理,仅供参考 →http://i8c.cn/qVYDN
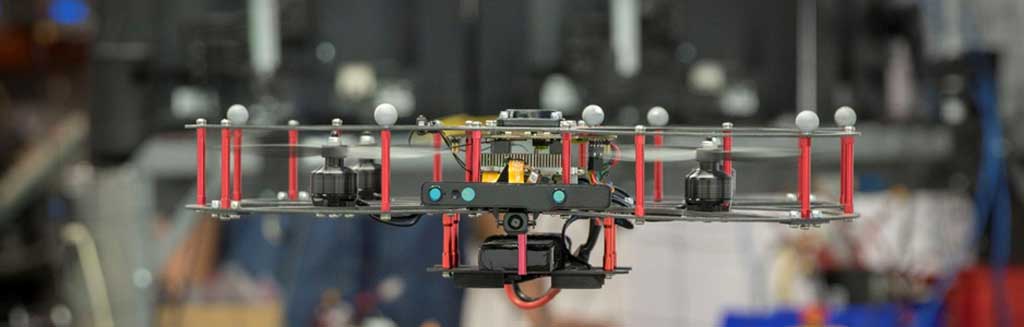
● 实验目标:这种开放式研究级无人机,是多智能体、swarm和基于视觉的应用程序创新研究的理想选择。 ● 实验功能:定制的抗冲击碳纤维框架使QDrone具有高度的机动性和抗冲击能力,维修所需的停机时间很少...
● 实验目标:这种开放式研究级无人机,是多智能体、swarm和基于视觉的应用程序创新研究的理想选择。
● 实验功能:定制的抗冲击碳纤维框架使QDrone具有高度的机动性和抗冲击能力,维修所需的停机时间很少。强大的车载处理器和两个高速&高分辨率的摄像头可以实现高质量的车载视频处理,以及流媒体传输实时监控。
● 特点
✔Intel® Aero 飞控计算机
✔超轻碳纤维框架
✔开放式软件架构
✔可扩展功能
● 用户现场
⭕ 点击下载(Download)
分享文章: