● 实验目标:学习如何使用状态空间对系统建模设计了极点配置反馈控制器。
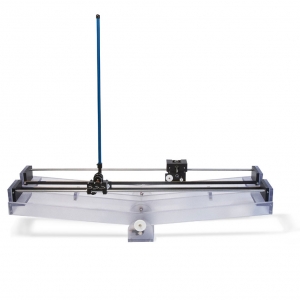
● 实验功能:装置使用一个传感器来测量关节的挠度,从而解决大型齿轮传动系统中遇到的控制问题。柔性关节模块用于研究机器人的柔性关节,特别是再在共振和振动分析中很受用。

● 特点
✔高精度铝合金结构件
✔高分辨率光学编码器,用于检测关节臂位置
✔可变负载长度和弹簧来更改系统参数
✔可变弹簧刚度
✔轻松连接柔性关节模块模块到旋转伺服单元
✔与MATLAB/Simulink和LabVIEW完全兼容
✔提供完整的MATLAB®/Simulink系统模型和参数文档
✔开放式架构设计,允许用户设计自己的控制器
● 配套实验
✔建模课题
-
- 拉格朗日导数
- 状态空间表示
- 模型验证
- 参数预估
✔控制课题
-
- 极点配置
- 振动控制
● 应用案例
● 用户反馈